Video Article Open Access
Real-time SEM Image Denoising Based on Kalman Filtering
Xiang Fu1#, Yuting Yang1#, Song Liu1,2,*
1School of Information Science and Technology, ShanghaiTech University, Shanghai 201210, China
2Shanghai Engineering Research Center of Intelligent Vision and Imaging, Shanghai 201210, China
Vid. Proc. Adv. Mater., Volume 3, Article ID 2208323 (2022)
DOI: 10.5185/vpoam.2022.08323
Publication Date (Web): 19 Mar 2023
Copyright © IAAM
Graphical Abstract
Abstract
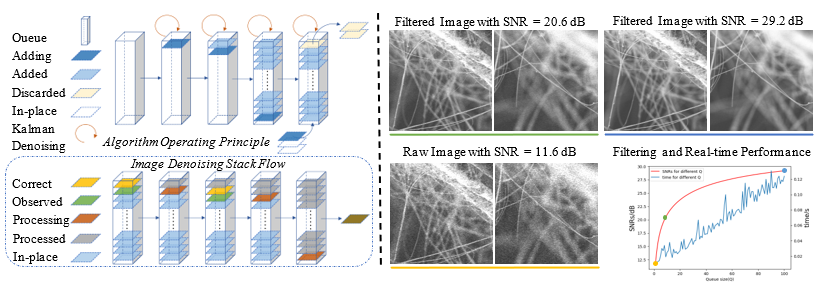
Scanning Electron Microscope (SEM) is an indispensable research facility in nano-material characterization and nano-manipulation, suffering from heavy noise inherently caused by the electron beam imaging principle. Researchers have been putting extensive efforts on SEM image denoising from the deep learning technique, facing the obstacles of limited training dataset and generality to materials and imaging conditions [1]. This paper proposes a novel, easy-to-implement, model-free, and versatile SEM image denoising method working directly over the SEM image flow in real-time, which is particularly friendly for scholars from material field without computer science background. In specific, the method follows the Kalman filtering framework, where a prediction image is always generated to trade off the noise from the instantaneously observed image by the observation uncertainty. The uncertainty of the noisy level of the observed image arising from the imaging process is statistically characterized by looking back to historic observations pixel-by-pixel regardless the SEM imaging parameters [2]. We systematically evaluated the method by both simulation and real SEM images (captured by JEOL JSM-IT500 over silicon nanowire specimen at 150 ms scanning period with 640×480 resolution) regarding the denoising and real-time performance. Experimental results well demonstrate that the proposed denoising method converges stably and rapidly to the best performance. By looking back to historic data within merely 1200 ms, a signal-to-noise ratio (SNR) of 20 dB can be achieved with execution time of about 20 ms on Intel i7 CPU at 2.5 GHz. Taking the SEM scanning time as the limit for algorithm execution, the SNR can reach as high as 30 dB, where the noise is substantially removed. In conclusion, we developed a Kalman filtering based SEM image denoising framework, which supports almost noise-free SEM imaging in real-time. The method is designed to be adaptive to all types SEM and materials, and is particularly supposed to benefit material-related research with SEM, like material screening. Nano-manipulation research like nano-wire mechanical characterization by nano-robot within SEM will also benefit from this technique.
Keywords
SEM image denoising; kalman filter; nano-characterization; SEM.
Acknowledgement
This paper was sponsored by China Shanghai Pujiang Program under Grant 21PJ1410500.
References
- Z. Qu, Z. Yang, and C. Ru, IEEE International Conference on Nanotechnology, 2020.
- F. Timischl, M. Date, S. Nemoto, Scanning, 2011, 33, 1-8.
Biography
Xiang Fu is an undergraduate student from School of Information Science and Engineering, ShanghaiTech University, Shanghai, China. He is going to begin his graduate study in the Advanced Micro-Nano Robot Lab, ShanghaiTech University since Sep. 2022. His current research interests include image denoising, deep learning-based models, and nano-manipulation in SEM.
Yuting Yang received the B.S. degree from Jilin University in Instrumentation and Measurement, Jilin, China, in 2020. She is now a Master student with the Advanced Micro-Nano Robot Lab, ShanghaiTech University, Shanghai, China. Her current research interests include visual servo control, image processing, nano-robotic manipulation.
Song Liu received the B.S. degree in Sensing Technology and Instrumentation from Shandong University, Jinan, China, in 2012, and the Ph.D. degrees in control science and engineering from the University of Chinese Academy of Sciences, Beijing, China, and City University of Hong Kong (CityU), Hong Kong, respectively, in June 2017. From July 2017 to 2018, he was a Post-Doctoral Fellow with the Robot Vision Research Lab, Department of Mechanical Engineering, CityU, Hong Kong. From Jan. 2019 to Sep. 2020, he worked as a Post-Doctoral Scholar with the MEMS Group, University of Southern California, Los Angeles, CA, USA. He is now serving as a Tenue-Track Assistant Professor in ShanghaiTech University, Shanghai, China. He is the director of Advanced Micro-Nano Robots Lab, ShanghaiTech. His current research interests include ultrasonic MEMS, robotics sensors, visual servo control, and robot learning. Please visit his Google Scholar for more relevant publications at https://scholar.google.com/citations?user=n2rWxVQAAAAJ&hl=en.
Video Proceedings of Advanced Materials
Upcoming Congress
